Efter explosioner eller bränder i hus är det ofta farligt att vistas på platsen, men samtidigt vill polis undersöka platsen så snart som möjligt efter den inträffade händelsen. För att underlätta undersökningar och minska riskerna för polis och räddningstjänst har polismyndigheten utforskat användningen av robothunden Spot, utrustad med sensorer, för att undersöka brottsplatser i ett tidigt skede. I projektet ”Skanning av explosioner” använde man Spot för att undersöka en källare i ett nyligen nedbrunnet hus där temperaturen fortfarande var 150 grader.
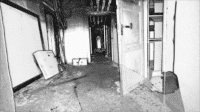
Ursprungligen var syftet med detta projekt att undersöka skadeverkan efter en explosion med hjälp av laserskanner monterad på en självgående robot. Projekt fick dock ställas om till skanning av brand då det hus som skulle undersökas brann ned. Branden gjorde det möjligt att istället undersöka hur visuella sensorer i form av en GoPro kamera, samt en markbunden 3D-laserskanner kunde användas i ett tidigt skede efter en brand. Byggnaden var fortfarande varm då roboten skickades in först med en GoPro kamera, sedan den markbunda 3D-laserskannern. Filmer från GoPro och 3D-modeller har visats sig användbara för att öka förståelsen av platsen i ett tidigt skede av en utredning.
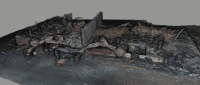
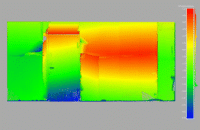
Markbunden 3D-laserskanning har använts vid forensiska ärenden så väl vid explosioner som bränder för att dels erhålla en ökad förståelse av platsen, dels för att kunna utföra analys i 3D-data, exempelvis studera skadeverkan på byggnader. Figur 1 visar en 3D-modell av en källare efter en större detonation. I mörka utrymmen och när det har brunnit fungerar vare sig kamerainformation (RGB) eller laserintensitet särskilt bra. Modellen kan då färgsättas med en monokrom färg (vit i detta fall) och ett visuellt filter detekterar kanter i 3D-modellen i den vy som visas. Figur 2 visar resultatet av en deviationsanalys då en skadad vägg jämförts mot ett plan som illustrerar en oskadad vägg. Analys likt denna kan användas för att studera hur en tryckvåg efter en detonation gått genom byggnaden.
Efter en kraftig explosion kan platsen vara så skadad att det vore direkt farligt att initialt skicka in människor för en undersökning. Genom att montera kameror och en markbunden 3D-laserskanner på en robot möjliggörs en säker undersökning och avbildning av platsen och minimerar risken för personskador.
Syftet med detta projekt har varit att visa hur en robot (Boston Dynamics Spot) i ett tidigt skede kan användas som sensorbärare. Spot har dels försetts med en GoPro, dels en markbunden 3D-laserskanner. Film och 3D-data har samlats in för att visa att det går att samla in film och 3D-data utan att utsätta en människa för fara.
Målet har varit att visa konceptet att använda en robot för att samla in film och 3D-data i ett tidigt skede efter en händelse, samt dra nytta av insamlad data som kan användas för en ökad förståelse av platsen och vidare analys av skadeverkan.






Projektet drevs av
NFC
Deltagare
Visual Sweden, NFC, Polismyndigheten, Försvarsmakten, FOI, AMKVO AB